RPi Communication
When we first came up with the idea for this project, we envisioned our system using TCP or UDP to communicate between the two Raspberry Pis through the use of mobile hotspot.
However, we knew that we would have to break the problem down into smaller problems by adopting an incremental development design methodology.
The first iteration of our testing, we developed scripts that could communicate between two computers on the same WiFi network which allowed us to develop and test code faster.
This was done easily with the Python socket library to establish a TCP connection or send messages using UDP.
This code is available in the code appendix as tcp_ip_server.py, tcp_ip_client.py, udp_server.py, and udp_client.py.
Both UDP and TCP required the server and the client to connect to a specific port on a specific IP address.
Due to the design of the protocols, TCP is more reliable since it can verify whether or not the host receives a message whereas for UDP, the client never knows whether the message is received.
Since TCP is a stream-oriented connection, the client and host must establish a connection to send a stream of bytes, it has a larger overhead compared to UDP (which solely uses datagrams).
This led us to use UDP for our programs because of strict real-time requirements and relatively flexible packet drop constraints.
The second obstacle that we encountered was trying to connect two laptops on two different WiFi networks.
Since the laptops are now on separate networks, we are not able to use their private IP addresses as the IP address in the code.
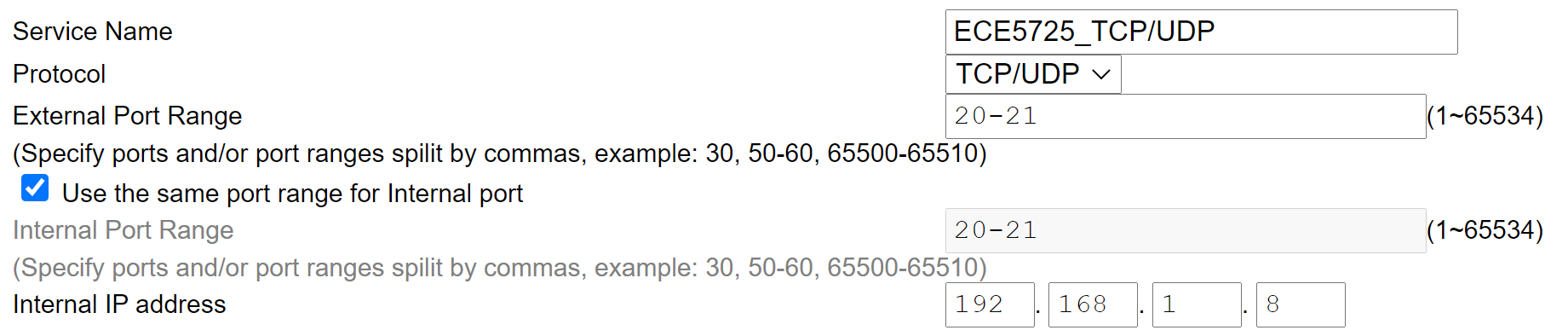
Instead, we must utilize the router’s public IP address and change the settings to allow for port forwarding.
This allows a computer to send data to a specific port (in this case, port 20-21) on the other network’s router which will then forward the data to the other player’s computer.
We were able to successfully send messages to each other’s devices while on two different networks after changing the router's setting as shown below.
The next step was to find a way to change port forwarding settings on our mobile hotspots.
Since we were originally using our home networks, it was easy to change port forwarding settings.
However, as we did more research, we realized that mobile hotspots are protected behind an Internet Service Provider (ISP) firewall which does not allow for port forwarding (unless you pay a significant amount).
We had to quickly change gears and try a different way to communicate between the two Raspberry Pis.
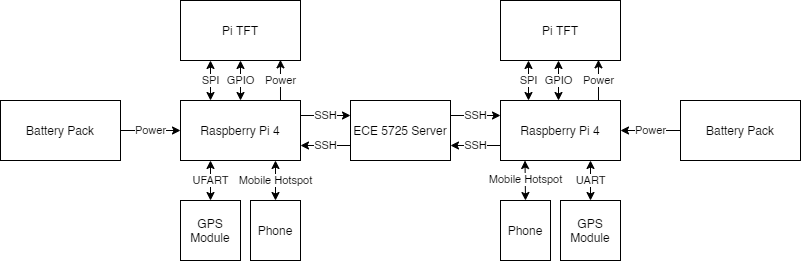
After looking at many different Python libraries, we settled on using the class server as a meeting point for the two Raspberry Pis.
We created a Secure Shell (SSH) client on both Raspberry Pis to write and read files on the server as a way to communicate.
We leveraged a library called paramiko which requires the IP address, username, and password to connect to a server.
A bug that we ran into is that if a file is read while it's being written to, the readline will return as an empty string.
We were able to quickly patch our program by only taking in non-empty strings as parsed data.
In order to simplify the synchornization, we decided to design our communication protocol similar to UART where one file is used for sending data and another file is used for receiving data.
Additionally, we were able to easily send different types of data by using comma-delimited formatting.
Our initial tests were a success and can be viewed or executed with the serverRW.py file.
This establishes the communication link between the two RPi systems as shown below.
We first tested RPi communication indoors and then moved to using hotspot and doing so outdoors. While testing the fully integrated system with the GPS modules and pygame logic, we ran into issues of the screen freezing halfway through playing the game outside. At first, we thought it was a temperature problem with the RPi or GPS module. However, after looking at the data sheet, we saw that the cold temperature was not the issue. Finally, we figured out that the RPi froze in displaying the pygame screens because it was switching from our hotspot to wifi connection even when we were outside. Thus, we made sure to play this game away from any wifi connections the RPi may have when doing final testing.
GPS Data
The first GPS goal was to communicate with the GPS module and parse the data. We needed to get both working individually on each Raspberry Pi.
A challenge that we faced was cold-starting the GPS module as these GPS modules were brand new and made in China and acquiring signal took more than 20 minutes of waiting outside.
However, once the GPS modules acquired signal, they store the general location in memory such that if they are restarted, they will not need to cold-start again.
The next time we tried starting the GPS modules, it only took 1 minute to acquire a GPS lock.
By using a micro-USB cable, we were able to simplify the hardware and avoid circuit connectivity issues with headers.
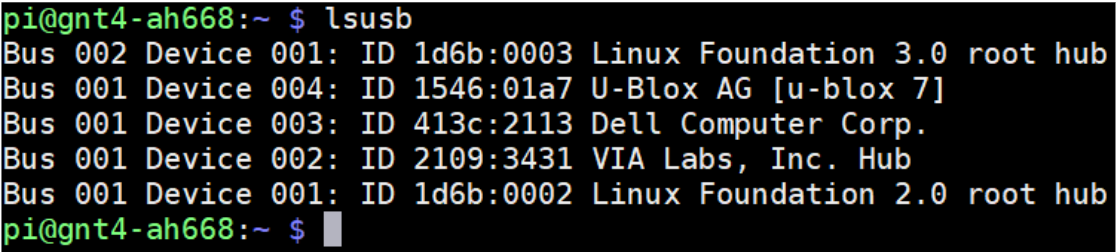
To find which port to read from, we first looked at the devices and on the bus by typing in the command “lsusb” and saw that
the GPS module corresponds to U-Blox AG, device 4 as shown below.
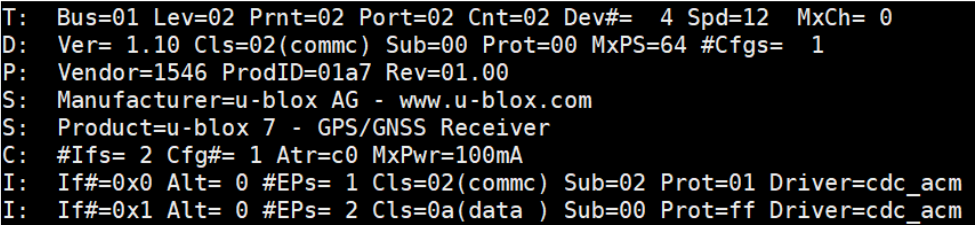
Next, to find the associated driver, we used the “usb-devices” command, which displays detailed information on the devices connected to the USB. Below is part of the output that corresponds to the GPS module. We saw that the driver is cdc_acm so when looking at the various drivers under the dev directory, we know that the ttyACM0 is the corresponding driver.
We used the serial library to read the data from the GPS module as well as the pynmea2 library to parse the GPS data.
We parse each line and read the message if the sentence contains ‘GGA’, which means the sentence indicates the fixed data in GGA
NMEA format for the GPS module, allowing us to obtain GPS coordinates.
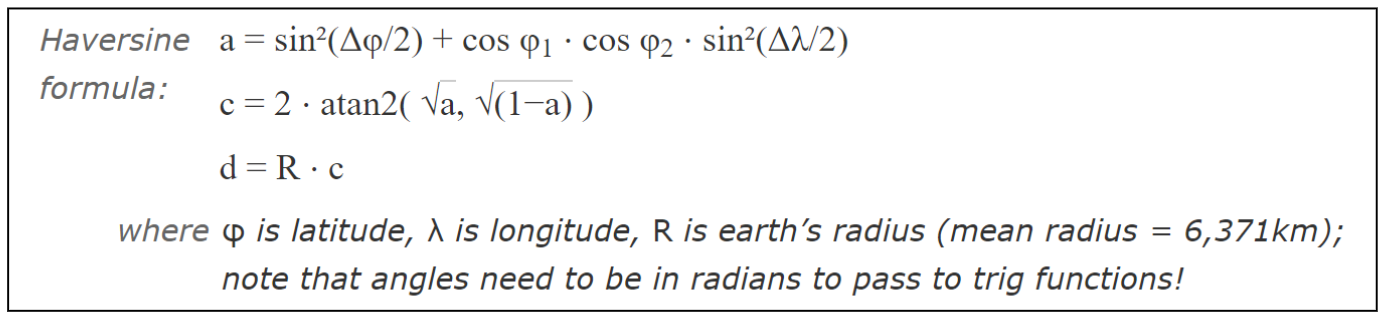
Now that the GPS coordinates can be obtained, we determined the distance using the Haversine formula, as shown below.
We saw that at best, when the GPS modules were directly next to each other, we were able to obtain a measurement of about 3-9
meters. In order to try to obtain more accurate data, we looked at the average altitude in collegetown to replace the averaged
Earth’s radius, but found that the mean radius actually produced better results than the collegetown radius. If we had additional
money to spend on this project, we would purchase a differential or carrier-phase tracking GPS module to get centimeter accuracy.
We believe that with additional tweaking, we could possibly get a more accurate reading, but for $10 GPS modules from Amazon
operating in the Ithaca weather, we believe this is a reasonable accuracy.
One issue that we ran into involved reading the GGA sentences from the GPS module. While creating the initial test script, we used
an if statement to check if the sentence was in GGA format. However, as we designed the game, we saw that our GPS location was updating
much more slowly than usual. This was because our module would simply check the sentence for GGA format, and if it wasn't, it would continue
on to the rest of the game logic. Since GGA sentences are only sent so often, we would be missing a lot of the GPS location updates as we
computed the game logic. While debugging the game, we changed the if statement to a while loop in order for the game to receive as many GGA
sentences as possible.
Game Finite State Machine
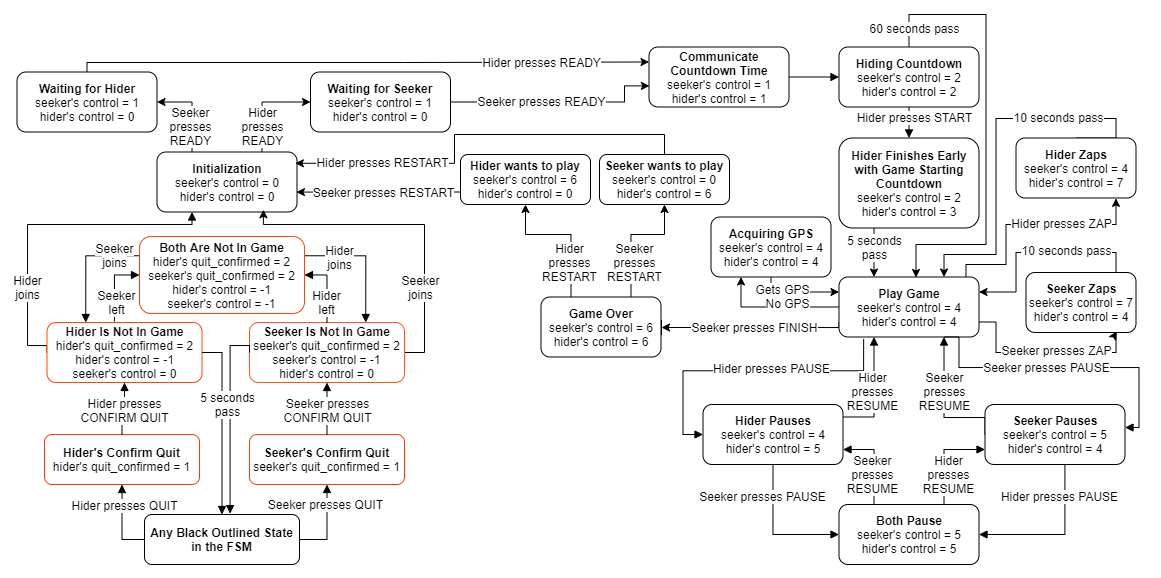
Our next goal was to develop an FSM description of our game such that we could simplify the code implementation. This was also helpful in creating screens for each different state. Each player has a control variable, which take the value from -1 to 7 inclusive. Thus, each state is based on the combination of each player's control variable. This control variable is communicated on the server so that each player can advance to the correct state in real time. Regardless of the control variable, each player will read and write its current state to the sever each time the screen updates. This ensures that the server as well as the Raspberry Pi both have the most up to date copy of the game variables. Below is the diagram of the finite state machine (FSM), which can be further broken down into the pre-game portion (top of the FSM), the game portion (bottom right of FSM), and the post-game portion (bottom left of FSM).
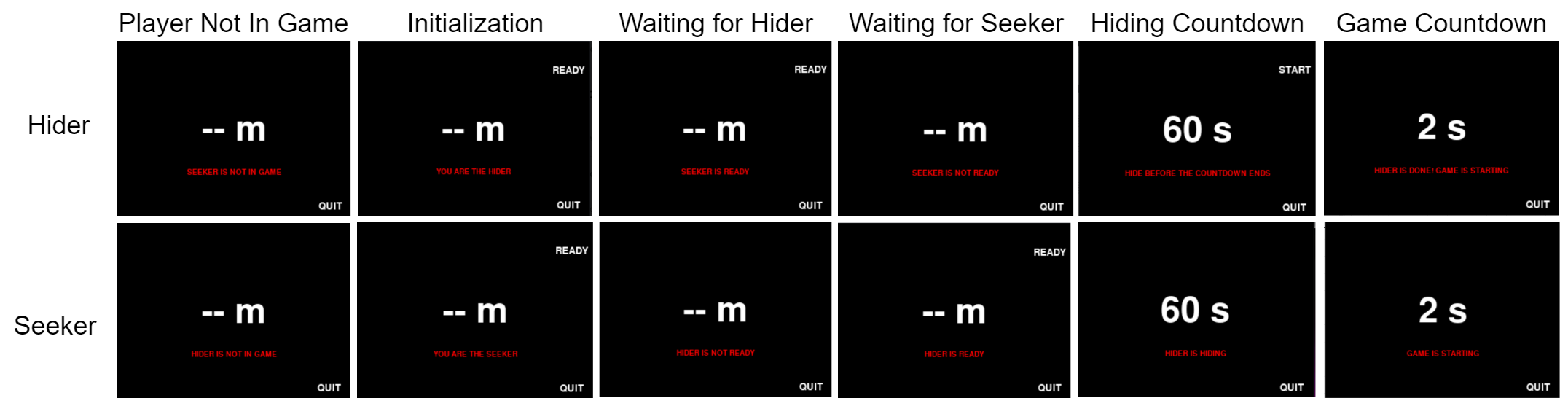
Pre-Game
The pre-game section starts when one of the players join up until the countdown when the game starts.
When the player is not in the game, his or her control variable is -1. Once the player enters the game, their control variable updates
to 0. If the other player has not entered the game, there is a note in small red text to inform the player that the other player has
not joined. Having this note enhances the player experience so they are aware of the other player's state. The color red was chosen to
catch the player's attention but the text was smaller so it would not distract from the other parts of the screen, which are more
important. The more important sections are displayed in white text on a black background for best contrast. The center is where part
of the screen is where the distance is displayed. During the pre-game portion, there is no distance since the game has not started and
so the display shows "-- m". The right side shows the menu options, which corresponding to the 4 GPIO pins on the PiTFT display.
During any portion of the game, the player can quit, and so there is a "QUIT" option even if there is only one player in the game.
This "QUIT" button is the bottom most as the exit option is usually placed at the bottom-right-most portion of the screen.
Once both players enter into the game, they start in the "Initialization" state. The note is updated to reflect which player is either
hider or seeker and the menu has "READY" option at the top. When a player presses the "READY" option, his or her control variable is
updated to 1 and written to the server. Additionally, the local time for when the button is pressed recorded and written to the server.
This way, when a second player presses the ready button, they can make a comparison between their recorded time and the other player’s
recorded time.
We programmed the RPi to always reference the newer time (when the second player presses the ready button) as the “start” of the game
which solves synchronization and locking issues. This corresponds to the "Communicate Countdown Time" state. There is also a note
displayed that notifies the current player that the other player is waiting for them to press "READY".
From there, both players transition to the "Hiding Countdown" state where the hiding countdown starts for 60 seconds.
Since we have synchronized the game “start time” between the two RPis, we do not have to worry about latency or communication issues
since the time is both locally kept as well as synchronized over the internet network. During the countdown, the seeker will stay in
place for a minute while waiting for the hider to hide.
At any point in this countdown, if the hider feels that they are ready for the seeker to start, they can press the start button to
initialize a game start countdown. This is the "Hider Finish Early with Game Starting Countdown" state and the hider’s control variable is
updated to 3, which initializes a 5 second countdown timer with a note to inform the seeker that the hider is done hiding.
Otherwise, the game will continue to countdown until 60 seconds have passed. Below are the screens for the pre-game portion.
Game
The game section starts when the countdown ends and the seeker starts to look for the hider. At this point, both the hider
and the seeker can move, but the hider can only walk. The seeker will be able to use the relative distance to get an idea of
the general location of the hider while the hider will know if the seeker is getting closer or further away. Both players' control
variables are set to 4 during the play game phase. During this state, each player's RPi will read the serial port to obtain
the GPS data. It will wait until the GPS data sent is a NMEA GGA sentence (which means that GPS lock has been acquired) before parsing it.
We use the pynmea2 library for parsing the data into latitude and longitude. The latitude and longitude are then passed into the
Haversine formula (along with the other Pi's location which was read from the server). If there is no GPS signal, then the calculated
distance will be absurdly large and the number will be replaced by "## m" on the screen.
A critical feature to have in any type of game is the ability to pause. We implemented our pause functionality by changing to another state.
When one player presses the pause button during the game, their control variable will change to 5. This causes both their screen as well as
the other player's screen to show the "PAUSED" text. While the game is paused, the other player also has the option to press pause if they
must attend to anything, but both players must be unpaused (hit the resume button) in order for the game to start again. Additionally,
there will be a note at the bottom of the screen indicating which players have hit pause. Similar to the pre-game state, the ability to quit
at any time is still in place.
Another feature that we implemented in the play game state is the ability to gain power ups. Each time the screen updates, the code will
roll a random number between 0 and 100. If the number is 0, the player will receive a power up called "ZAP". This power up can be used by
pressing the button and will temporarily disable the other player's ability to pause and see the relative distance. The zap feature was
implemented by briefly changing the player's control variable to 7 for 10 seconds. While the other player's control variable is 7, the
current player's screen will show "?? m" instead of the actual distance. We noticed that this gives at least one player a zap about once
every minute and is a good pace for fast-paced games. One thing to note that is if a player is zapped while having
a power up, they can still zap the other player while they are zapped.
Since it can still sometimes be difficult to find the hider if they are good at hiding, we wanted to implement a confirmation from the
seeker that they have indeed found the hider. Once the seeker is less than 10 meters away from the hider, they will see a button on the right
side of the screen to "FINISH" the game. Pressing the "FINISH" button will move the game into "post-Game" section by setting the seeker's
control variable to 6. The hider's Raspberry Pi will then see that the seeker has found the hider and also set its control variable to 6.

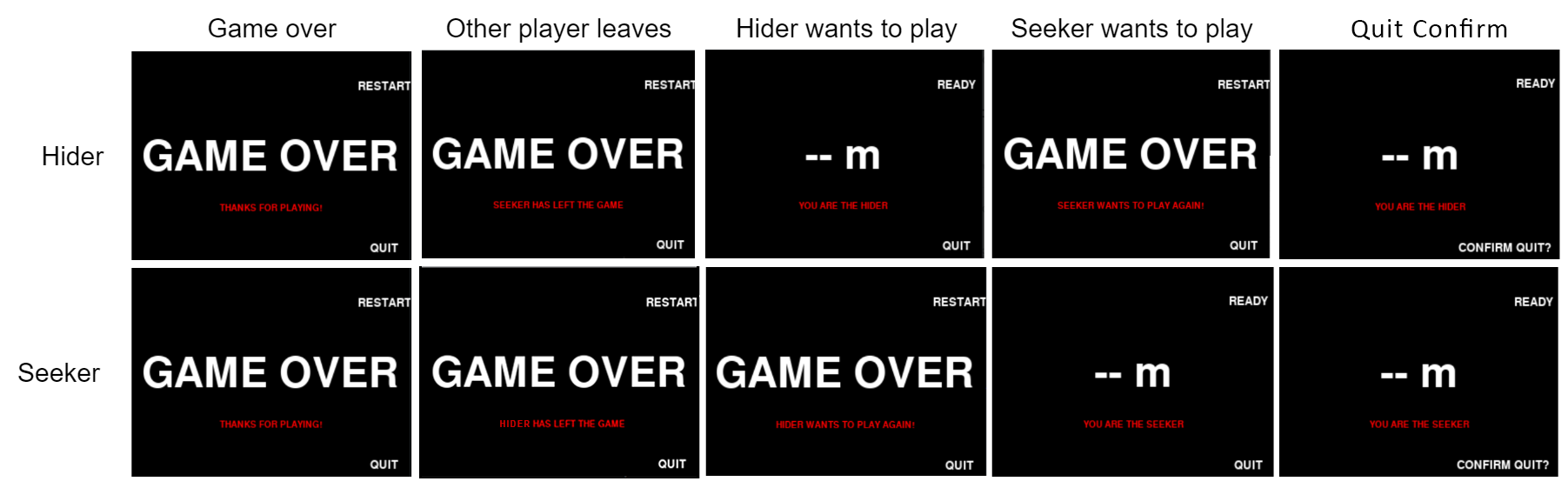
Post-Game
For the post-game section, players will see that the game is over because the hider has been found. There are several options that players
can choose from at this point. They can either play again, quit the game, or wait to see what the other player wants to do. If a player presses
restart, they will be taken back to the initialization screen and their control variable will be set to 0. Additionally, the other player that
has yet to hit the restart button will see a message that the other player wants to play again.
If at any point, for any reason, one of the players does not want to continue to play the game, they can press the quit button twice to leave
the game. If they only press quit once, a quit confirm message will remain on the screen for 5 seconds and then revert back to requiring two
quit button presses to leave the game. When one player has quit the game, the other player will also see a note saying that the other player
has left the game to ensure that neither player is waiting too long to determine the other player's intentions. Similar to what was mentioned
in the pre-game section, players that choose to quit the game will set their control variable to -1 before exiting to ensure that the other
player knows.